

ऐसा Robot जो Voice command से control हो सकता है इसे Arduino uno के use से बनाया गया है हमे सिर्फ इस command देना है जैसे Turn left,Turn Right ,Run,Stop और यह work करेगा www.mechanic37.com पर इसी page पर इस Robot की working और इस Robot को बनाने में लगा material और इस Robot को बनाने की पूरी विधि Images के साथ है,सभी steps इस Voice controlled Robot को बनाने के लिए follow करनी है नीचे दी steps से पहले में आपको इन steps को follow करने का तरीका बता रहा हूँ सभी Projects में आप इसे use कर सकते है
सबसे पहले हमे उन चीज़ों को Control करना है जो Project में Use हो रही है जैसे इस Project में क्या material use हो रहा है उसकी list नीचे दी है
सभी material parts को assemble करना है जैसे की Remote control car बनाना है तो Remote से मोटरों को Control करें और उसके बाद car की body बना के उसमे मोटरों को set कर दें बस,ऐसे ही हर एक Project में
सबसे पहले circuit बना के देखें की सभी devices सही तरीके से काम कर रहे है या नहीं जब Circuit बन जाये और सही तरीके से काम करने लगे तो Voice control Robot की body बनाएं और Circuit और Body assemble कर दें इस Voice controlled Robot में Arduino uno और household items का Use करेंगे Servo motors को Continuous Rotation के लिए modify करें
Voice Command Working
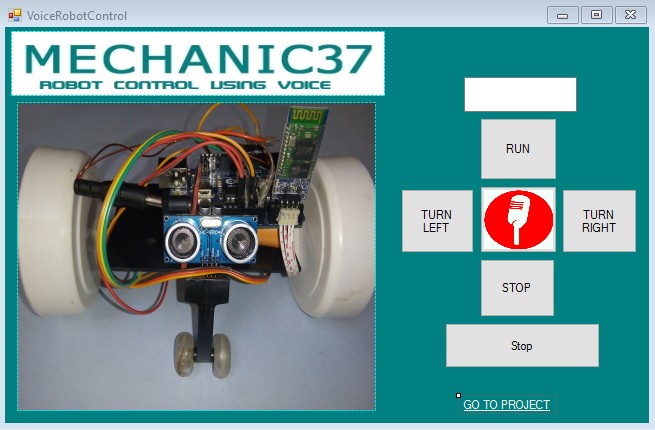
Voice control system use करने के लिए मेने एक software बनाया है जो window में install होगा Arduino uno से servo motors जुडी होंगी और Bluetooth module hc-06 Arduino के साथ use करेंगे जो computer की Bluetooth को Arduino से connect करेगी फिर इस software को launch करने पर button से भी control होगा और mic का button press करने पर voice command left-right,run-Stop देने से यह Robot control होगा
NOTE-इसका COM Port पता करें Device monitor में जाकर और VoiceRobotcontrol.exe को launch करें यह COM57 पर काम करेगा यदि आपका computer hc-06 को किसी दुसरे Port पर दिखा रहा है तो आप comment में बता सकते है
Using Material
Hardware
Arduino uno or mega

2XContinuous Rotation micro Servo
Bluetooth module hc-06 और hc-05

Ultrasonic Sensor Hc-Sr04 (Optional)
{kind=link}

2Xbottle cap or Wheel

Softwares
- Arduino IDE
- Visual Studio 2015 (Optional)
Robot Circuit,Voice Interface
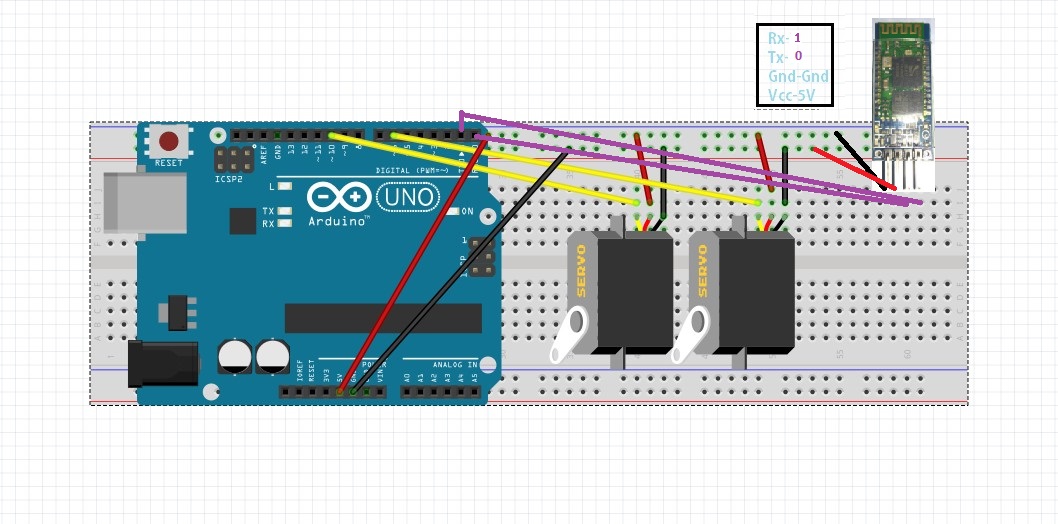
अब हमें Arduino से bluetooth module hc-06 को connect करना है अब
Hc-06
- Bluetooth module Hc-06 की Rx-Tx दोनों पिनों को 0,1 से connect करें
- Hc-06 की Vcc pin को Arduino की 5v से connect करें
- Gnd को Arduino की Gnd से connect करें
Servo Motor
- Servo motors की yallow pin को digital output pin 10 और 6 से connect करें
- Brown pin को gnd से connect करें
- Red को 5v से
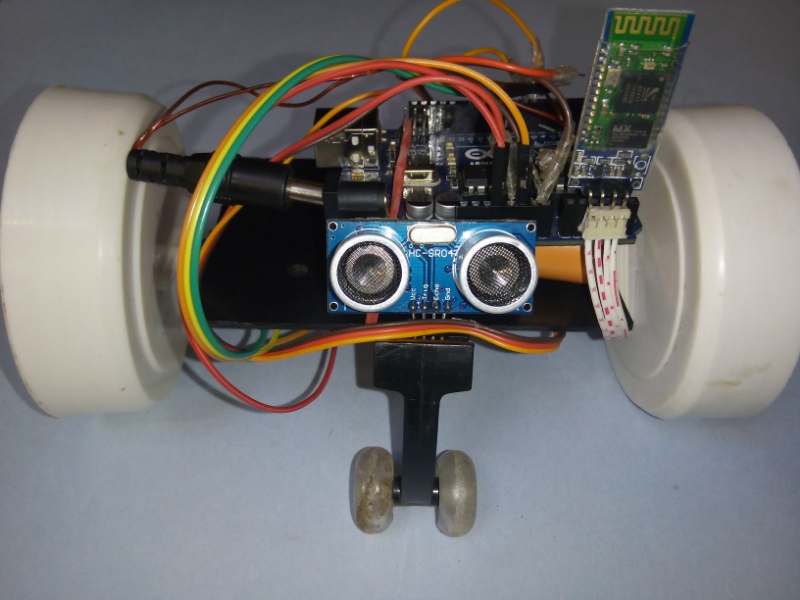
Robot Body बनाएं
Servo motors को इस robot में use करने के लिए उन्हें modify करना होगा जिससे ये दोनों Servo motors 360 continu rotate हो सके



इमेज की तरह parts को assemble कर लें glue gun के use से joint मजबूत रखें और सभी wires को भी सही से set करें इस robot को power देने के लिए 9-12 volt की battery use कर सकते है ultrasonic sensor का use कर सकते है पहले use नहीं करें जब voice command से control होने लगे तब comment में बता सकते है तब में ultrasonic sensor को इस voice controlled robot के साथ use करने का code दूंगा
Voice Command Robot Programming
इस Program को यहां से copy कर Arduino IDE में Paste करें और इस sketch को Arduino uno में Upload करेंhow to upload Sketch
Robotic Arm In Hindi
#include <Servo.h> //Import the Servo library
Servo SERVO_1;
Servo SERVO_2;
char Visual;void setup() {
Serial.begin(9600); // Initialize Serial Communitication
SERVO_1.attach(10);
SERVO_2.attach (6);
}
void loop() {
char Visual = Serial.read();
switch (Visual) {
case ‘1’:
SERVO_1.write (0);
SERVO_2.write (180);
break;
case ‘2’ :
SERVO_1.write (180);
SERVO_2.write (0);
break;
case ‘3’ :
SERVO_1.write (10);
SERVO_2.write (5);
break;
case ‘4’ :
SERVO_1.write (5);
SERVO_2.write (10);
break;
}
}
Voice Control Robot की body और circuit system बनाने और sketch upload करने के बाद हमे इस System को power देने के लिए 9-12 volt की battery use में ले जैसे ही आप इस robot को power देंगें तो Arduino uno और hc-06 में लगी led on हो जाएगी अब यदि आप यदि अपने mobile या pc से bluetooth scan करेंगे तो यह hc-06 show होगी
आपको इसे अपने pc से Pair करना है और connect करना है password 1234 fill करें और connect करने के बाद इसका COM Port पता करें Device monitor में जाकर और VoiceRobotcontrol.exe को launch करें यह COM57 पर काम करेगा यदि आपका computer hc-06 को किसी दुसरे Port पर दिखा रहा है तो आप comment में बता सकते है में आपको दुसरे software की link दूंगा और फिर आप इस Robot को voice command दे कर control कर सकेंगें और buttons को click करने से भी
read करने के लिए thanks इस project को fb,whatsaap पर share करें और कोई problem हो तो comment में लिखें
Leave a Reply