
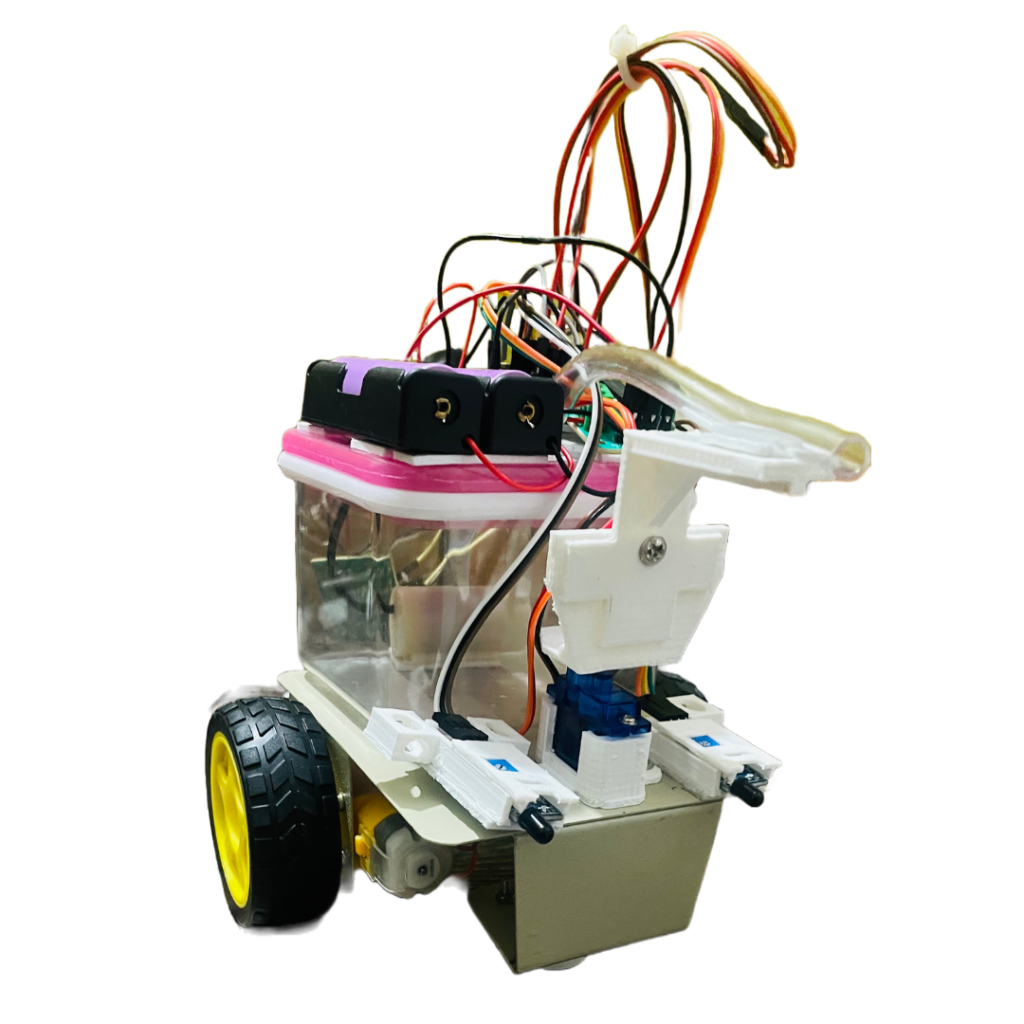
फायर फाइटर रोबोट बहुत ही बढ़िया और सिंपल प्रोजेक्ट है आप इसको अपने फाइनल ईयर या फिर साइंस फेयर प्रोजेक्ट के लिए यूज कर सकते हैं इस पेज पर आपको फायर फाइटर रोबोट बनाने के लिए सर्किट कैसे बनाते हैं और इसमें प्रोग्राम कौन सा अपलोड कर रहा है सारी डिटेल है आप अच्छे से पढ़ लीजिए और इसको बना सकते हैं
फिर आप इस प्रोजेक्ट को खरीदी सकते हैं और जो नीचे जानकारी है उसको अपनी प्रोजेक्ट फाइल में लिख सकते हैं – BUY Fire Fighter Robot
फायर फाइटर रोबोट कैसे बनाएं ?
इस पेज पर मैंने किसी फायरफाइटर रोबोट को बनाना बताया है या फिर आप इसको खरीद सकते हैं इस फायर फाइटर रोबोट को बनाने के लिए कुछ स्टेप फॉलो करनी है-
फायर फाइटर रोबोट के लिए मटेरियल
- Arduino Uno – Buy Uno Board And Motor Shield
- Motor Driver Shield –
- 7.2-9 Volt Battery –
- Micro Servo Motor –
- Water Pump 5V
- 2 Gear DC Motor –
- 2 Wheeler Chassis –
- Caster Wheels –
- Pipe For Water Pump –
- 3D Printed Parts For Servo,Sensors –
फायर फाइटर रोबोट बनाने के लिए सर्किट
आपको फायर फाइटर रोबोट के अब कनेक्शन करने हैं Download Circuit – Fire Fighter Robot Arduino Circuit
सबसे पहले आपको अपने Arduino Uno के ऊपर मोटर ड्राइवर शिल्ड को लगा लेना है और m1 और M3 दोनों की जगह पर डीसी मोटर के कनेक्शन करने हैं जो इस फायर फाइटर रोबोट के पहिए में लगेंगे अब M2 पर वाटर पंप जोड़ना है
मोटर ड्राइवर शिल्ड में देख रहे होंगे एक जगह सर्वो मोटर लिखा हुआ उसके पहले टर्मिनल में आपको माइक्रोसर्वर लगाना है A0 और A1 मैं आप को Flame सेंसर लगाने हैं
अब मोटर शिल्ड को एक्सटर्नल पावर देने के लिए 18650 सेल या फिर कोई भी 7 से 12 वोल्ट तक का डीसी पावर सप्लाई कनेक्ट करना है
सर्वो मोटर कैसे सेट करें
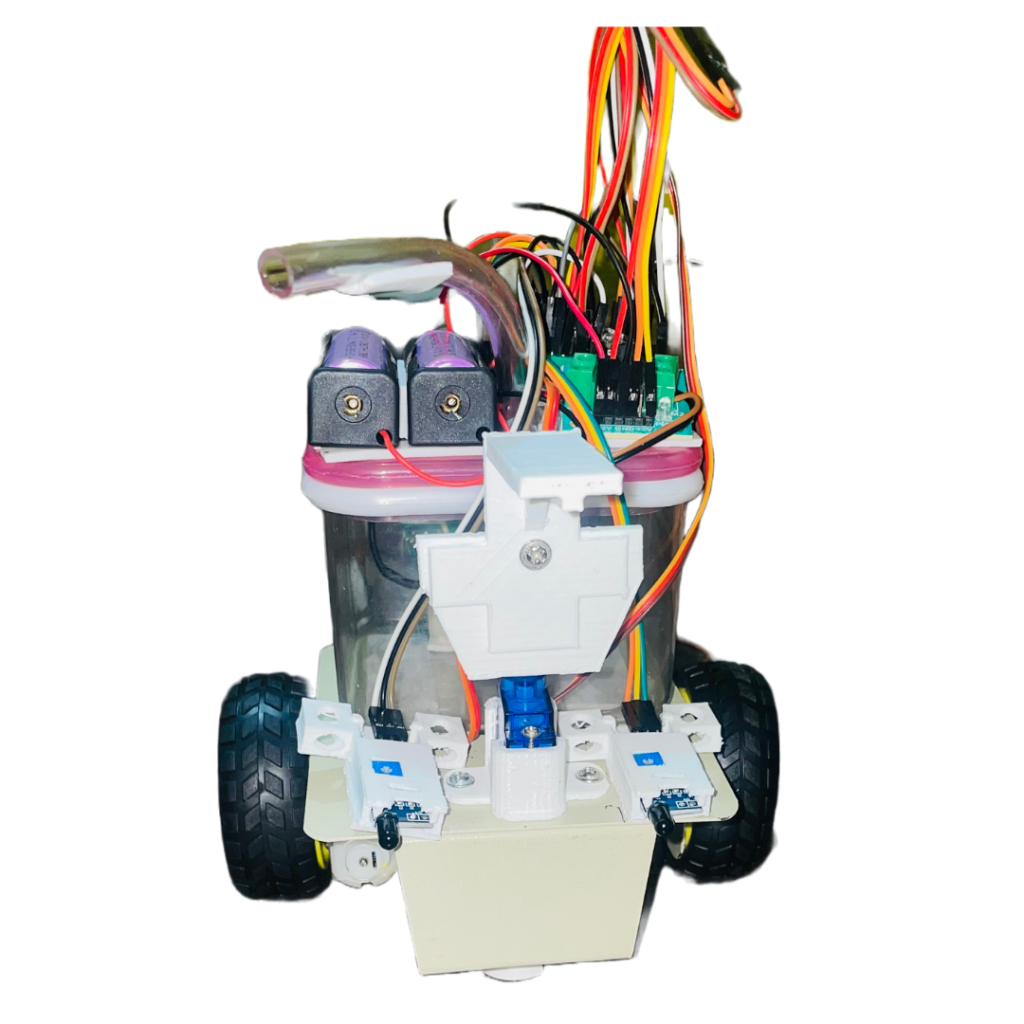
आपने 3D प्रिंटर से बनी हुई सर्वो मोटर स्टैंड अपने चेचिस पर सेट कर ली होगी अब आपको देखना है कि सर्वो मोटर किस एंगल में रहे आपको ध्यान रखना है कि आपकी सर्वो मोटर 90 डिग्री का एंगल सेट हो और knob लगा ले और देखें कि वह रोबोट के समांतर हो या बिल्कुल रोबोट की नाक के सामने हो मैं जैसा कह रहा हूं आशा है आप समझ रहे होंगे
एक छोटा सा प्रोग्राम लिखकर अपने Arduino Uno मैं अपलोड करना है फिर आप सर्वो मोटर का 90 डिग्री एंगल देख सकते हैं अभी आपकी समझ में ना आए तो आप नीचे कमेंट कर सकते हो मैं आपको एक छोटा सा प्रोग्राम दे दूंगा इसे अपलोड करके आप सर्वो मोटर को 90 डिग्री पर ला सकते हो अपनी Knob जोड़ सकते हो जो सर्वो मोटर के साथ मिलती है वाइट कलर की
फायर फाइटर रोबोट के लिए Arduino Sketch For Fire Fighter Robot
Arduino Uno माइक्रोकंट्रोलर बोर्ड में आपको ही है प्रोग्राम अपलोड करना है अपने कंप्यूटर की हेल्प से
#include <AFMotor.h>
#include <Servo.h>
Servo myservo;
int pos = 65;
AF_DCMotor motor1(1, MOTOR12_1KHZ);
AF_DCMotor motor2(2, MOTOR12_1KHZ);
AF_DCMotor motor3(3, MOTOR34_1KHZ);
void setup()
{
Serial.begin(9600);
myservo.attach(10);
myservo.write(90);
motor1.setSpeed(200);
motor1.run(RELEASE);
motor3.setSpeed(200);
motor3.run(RELEASE);
motor2.setSpeed(200);
motor2.run(RELEASE);
}
void loop()
{
// digitalWrite (2, LOW);
// digitalWrite (2, HIGH);
// delay(1000);
// delay(1000);
int sensorReading = analogRead (A0);
int sensorReading2 = analogRead (A1);
int range = map (sensorReading, 0, 1024, 0, 3);
if (range ==0){
Left();
Serial.print("0");
}
if (range ==1 ){
Serial.print("1");
}
if (range ==2 ){
Serial.print("2");
}
int range2 = map (sensorReading2, 0, 1024, 0, 3);
if (range2 ==0){
Right();
Serial.print("0");
}
if (range2 ==1 ){
Serial.print("1");
}
if (range2 ==2 ){
Serial.print("2");
}
}
void Center() {
motor2.run(FORWARD);
motor2.setSpeed(200);
// digitalWrite (2, LOW);
motor3.run(FORWARD);
motor3.setSpeed(160);
motor1.run(FORWARD);
motor1.setSpeed(190);
delay(500);
motor3.run(FORWARD);
motor3.setSpeed(40);
motor1.run(FORWARD);
motor1.setSpeed(40);
delay(500);
for (pos = 75; pos <= 140; pos += 1) {
myservo.write(pos);
delay(15); }
for (pos = 140; pos >= 75; pos -= 1) {
myservo.write(pos);
delay(15);
}
delay(2000);
motor2.run(RELEASE);
}
void Right() {
motor2.run(FORWARD);
motor2.setSpeed(200);
// digitalWrite (2, LOW);
motor3.run(FORWARD);
motor3.setSpeed(120);
motor1.run(FORWARD);
motor1.setSpeed(150);
delay(700);
motor1.setSpeed(200);
motor1.run(RELEASE);
motor3.setSpeed(200);
motor3.run(RELEASE);
for (pos = 60; pos <= 120; pos += 1) {
myservo.write(pos);
delay(15);
}
for (pos = 120; pos >= 60; pos -= 1) { /
myservo.write(pos);
delay(15);
}
motor2.setSpeed(200);
motor2.run(RELEASE);
delay(2000);
}
void Left() {
motor2.run(FORWARD);
motor2.setSpeed(200);
// digitalWrite (2, LOW);
motor3.run(FORWARD);
motor3.setSpeed(120);
motor1.run(FORWARD);
motor1.setSpeed(150);
delay(700);
motor1.setSpeed(200);
motor1.run(RELEASE);
motor3.setSpeed(200);
motor3.run(RELEASE);
for (pos = 60; pos <= 120; pos += 1) {
myservo.write(pos);
delay(15);
}
for (pos = 120; pos >= 60; pos -= 1) {
myservo.write(pos);
delay(15);
}
motor2.setSpeed(200);
motor2.run(RELEASE);
delay(2000);
}
void centerservo() {
for (pos = 65; pos <= 150; pos += 1) {
myservo.write(pos);
delay(15);
}
for (pos = 150; pos >= 65; pos -= 1) {
myservo.write(pos);
delay(15);
}
for (pos = 65; pos <= 150; pos += 1) {
myservo.write(pos);
delay(15);
}
for (pos = 150; pos >= 65; pos -= 1) {
myservo.write(pos);
delay(15);
}
}
वैसे यह प्रोग्राम सैंपल है और आपको ध्यान रखना है कि यह प्रोग्राम सिर्फ सेंटर में भर करेगा मींस आप अपना रोबोट बना लेंगे और फिर आप जब उसके सामने फायर लेकर जाएंगे चाहेंगे आगे बढ़कर अपना पंप स्टार्ट कर देगा वाटर पंप और आग को बुझा देगा
यदि आपको थोड़ी भी प्रोग्रामिंग आती हो तो आप इस प्रोग्राम को मॉडिफाई कर सकती हो वैसे लगभग पूरा प्रोग्राम यही है आप लेफ्ट राइट भी इसे कर सकते हो सब कुछ इसी प्रोग्राम में है आपको उसे अनकमेंट करना है और सही फंक्शन को ऊपर ले कर जाना है
रोबोट को लेफ्ट राइट कैसे करें
मान लीजिए यह रोबोट बिल्कुल सीधा चल रहा है अब इसी लेफ्ट करना है तब आपको प्रोग्राम में थोड़ी ता बदलाव करना है आपको राइट वाली डीसी मोटर 3 की थोड़ी सी स्पीड बढ़ा दे सब है रोबोट लेफ्ट की तरफ मुड़ जाएगा
motor3.setSpeed(200);
यदि आपको इस रोबोट को राइट तरफ मोड़ना है अब लेफ्ट लगी डीसी मोटर 1 अनिरुद्ध की स्पीड को थोड़ा सा बढ़ाना है तो यह रोबोट राइट तरफ मोड़ जाएगा
motor1.setSpeed(200);
यह थोड़ा आपको कॉम्प्लिकेटेड लग सकता है पर यह आसान है विश्वास कीजिए या फिर आप कमेंट कर सकते हैं मैंने आप कमेंट बॉक्स खोल दिया है
Leave a Reply